机器人超脑平台
平台简介
成为超脑平台用户
讯飞超脑板
产品规格
开发指南
标准协议
使用手册
环境准备
数据采集
应用算法
应用实例
镜像导出
镜像烧录
错误码
算法配置表
机器人多模态交互开发套件
多模态交互套件产品白皮书
多模态交互套件快速体验
多模态套件平台功能使用手册
多模态交互套件开发手册
常见问题与解答
智能语音背包
智能语音背包产品白皮书
智能语音背包产品规格书
智能语音背包产品快速体验
智能语音背包产品开发手册
联系方式
服务条款
超脑平台服务协议
超脑平台隐私政策
本文档使用 MrDoc 发布
-
+
首页
智能语音背包产品开发手册
当机器人完成智能语音背包的安装和调试后,机器人已经具备基本语音对话功能,但还不能实现语音对于机器人的运动控制。智能语音背包提供通信服务,会将语音指令以Socket方式推送给机器人主控。 智能语音背包实现录音、多模态降噪和云端语音服务交互,云端下发识别和语义结果到多模态套件,背包通过局域网socket协议(通过网线或wifi)将语音唤醒、识别、语义等结果发送给上位机,同时我们也支持将多模态的视频和音频信息发送给上位机机器人。 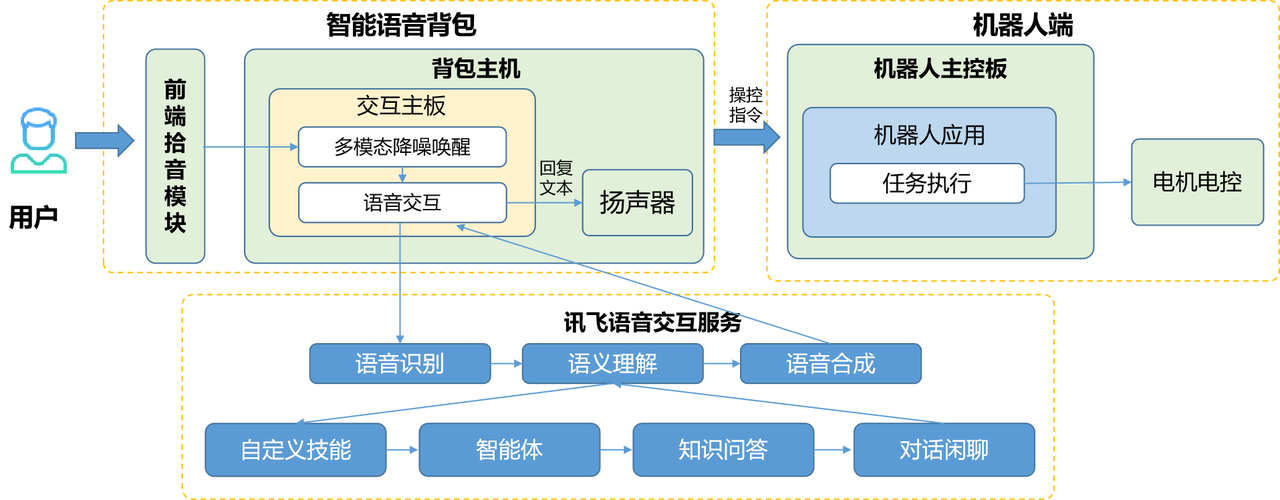 具体开发实现如下: ## 1. 建立机器人与智能背包通信 ### 1.1. 网络连接方式 语音背包和机器人主控Socket通信网络连接方式: 1. **无线连接(推荐)** 机器人与智能背包连接同一个网络,可以是有线,也可以是无线。机器人通过静态网络ip与智能背包通信。 2. **有线连接** 机器人与智能背包通过网线连接,智能背包设置网络共享,给机器人供网。智能背包设置静态网络IP,机器人通过静态网络ip与智能背包通信。 ### 1.2. 智能背包设置静态网络ip 第一步:电脑连接多模态算力主板后,打开投屏软件(scrcpy.exe),界面内按住鼠标左键上划 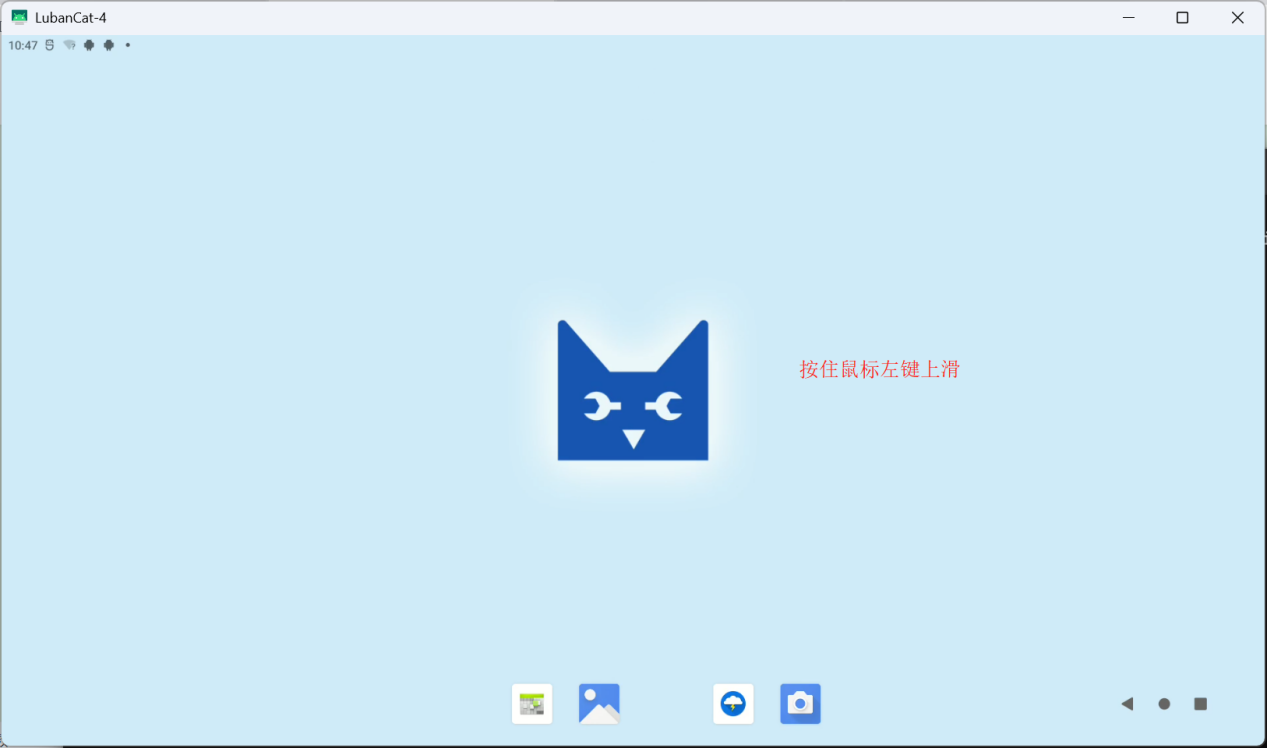 第二步:点击设置,点击网络和互联网,将设备联网 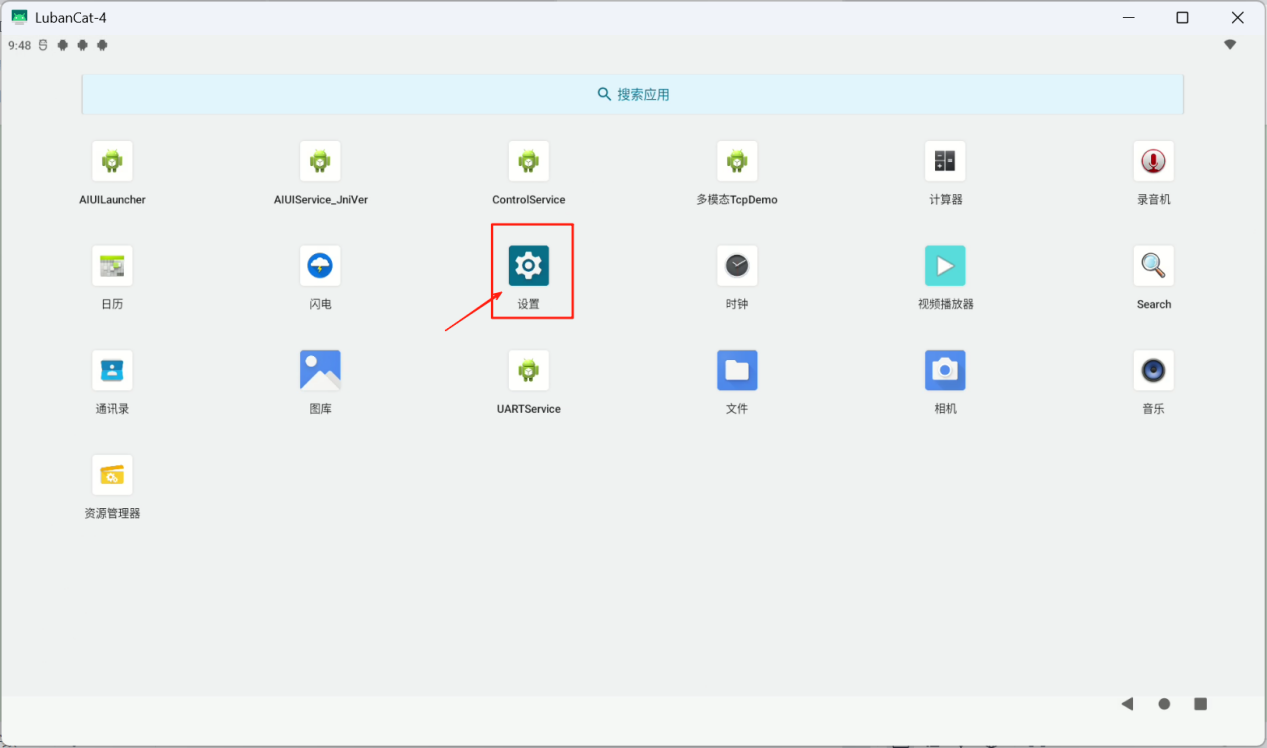 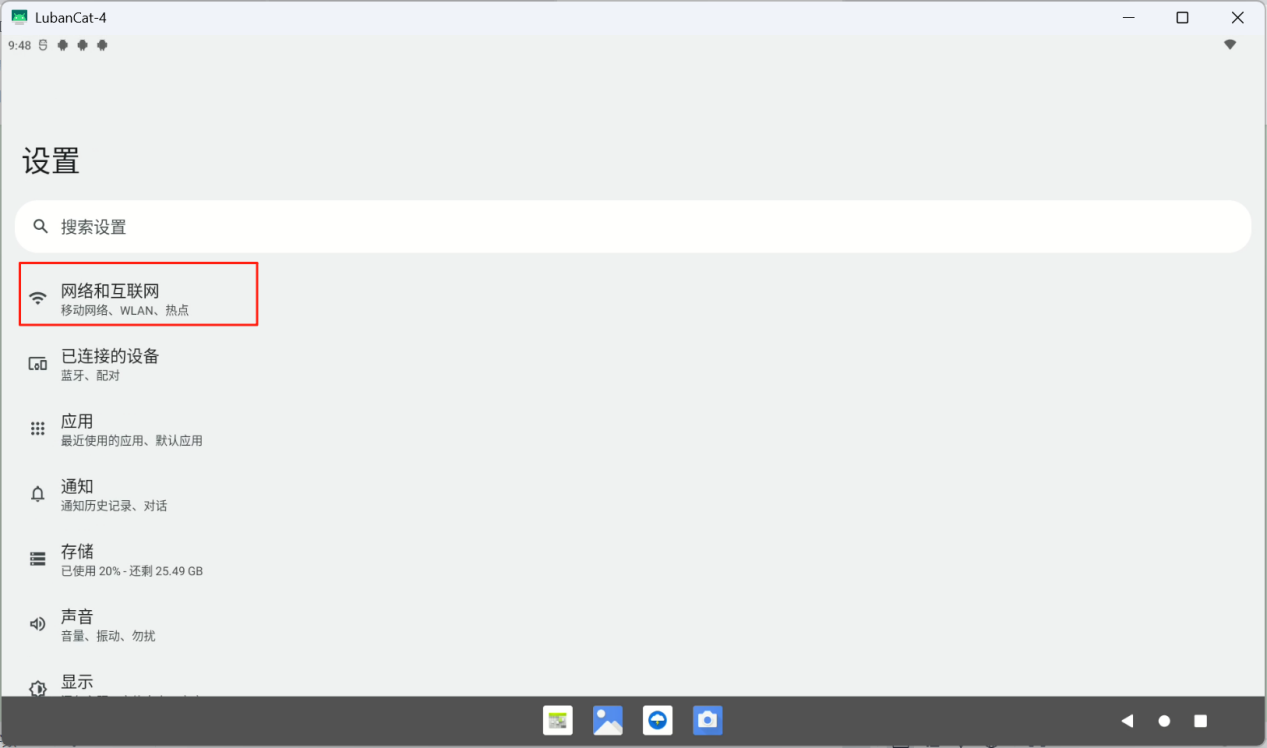 第三步:进入以太网  第四步:点击最下方的以太网ip模式选中静态ip  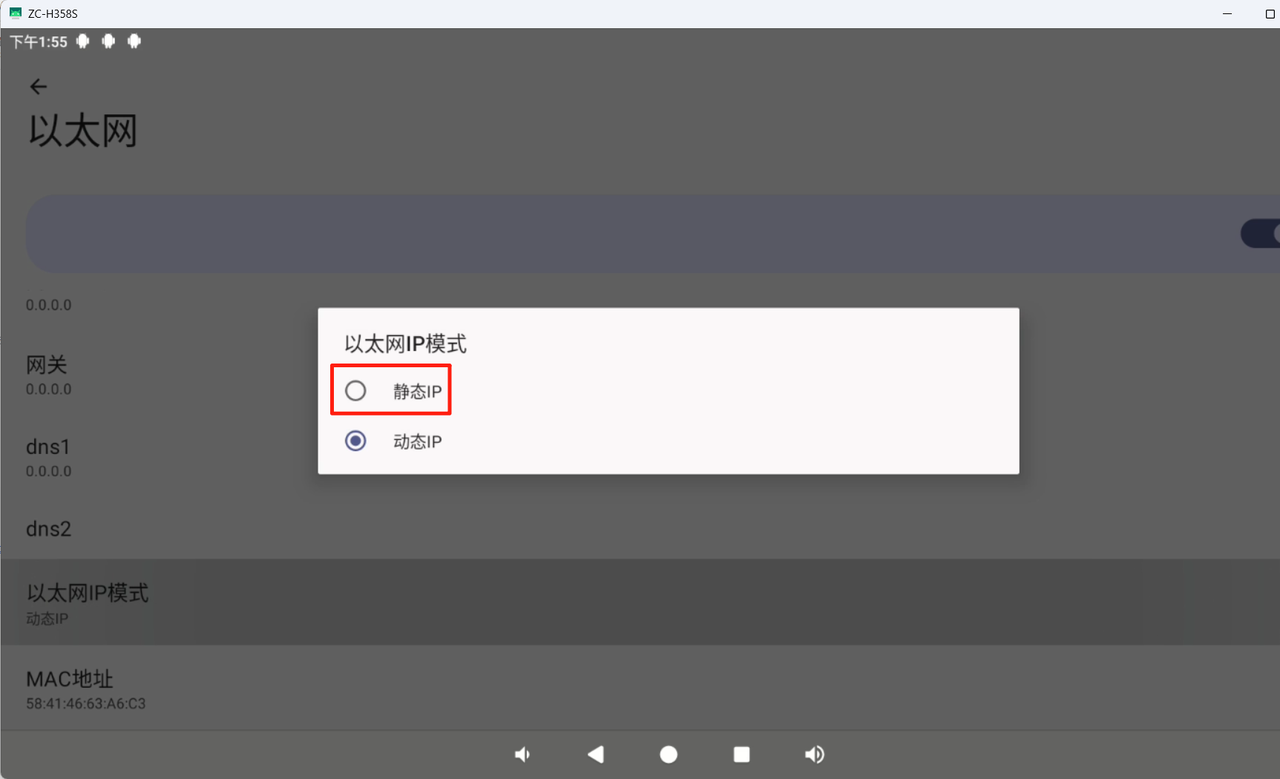 第五步:设置静态ip示例 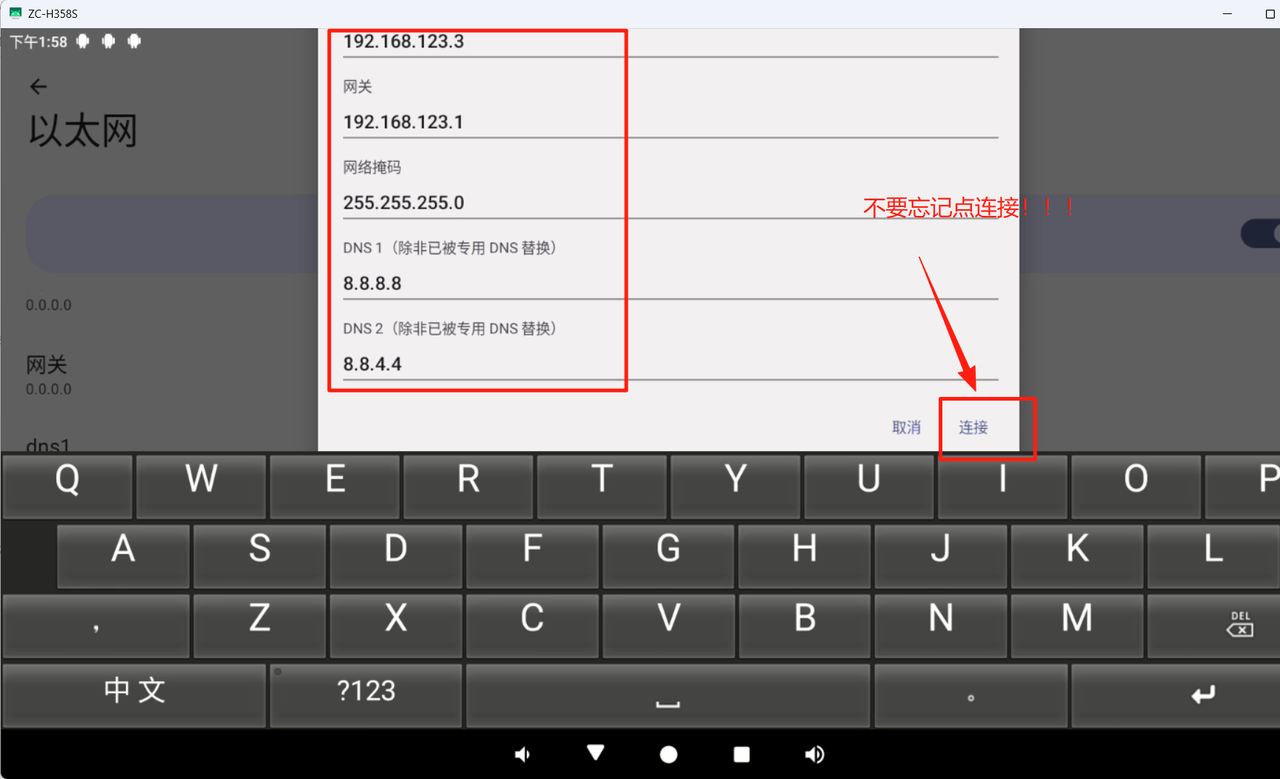 ## 2. 上位机开发 上位机(机器人端)获取语音交互信息我们提供了三个示例demo参考:(运行demo时需要将背包的tcpdemo切换到后台,否则会占用socket通道) [多模态 Demo下载](https://www.yuque.com/iflyaiui/zzoolv/xk9rpv?singleDoc#) 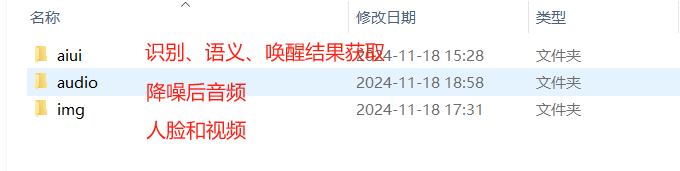 - 【识别语义传输协议】[https://aiui-doc.xf-yun.com/project-1/doc-367/](https://aiui-doc.xf-yun.com/project-1/doc-367/) - 【音频传输协议】[https://aiui-doc.xf-yun.com/project-1/doc-392/](https://aiui-doc.xf-yun.com/project-1/doc-392/) - 【视频传输协议】[https://aiui-doc.xf-yun.com/project-1/doc-360/](https://aiui-doc.xf-yun.com/project-1/doc-360/) 上位机(机器人端)通过识别语义传输协议,获取识别结果、语义结果等结构化数据,动作指令语义协议通过5.1.4 自定义技能实现,可结合机器人功能自行定义。如定义了如下机器人动作指令:  动作指令交互时如"握个手",语义结果下发结构化数据如下,上位机(机器人端)拿到握手意图标识(handshake),执行握手动作,即可完成语音到机器人握手动作全流程。 ~~~ json { "answer": { "text": "好让我们握个手吧", "type": "T" }, "category": "OS14948762876.action", "data": { "result": null }, "intentType": "custom", "rc": 0, "semantic": [ { "entrypoint": "ent", "hazard": false, "intent": "handshake", "score": 1, "slots": [], "template": "握个手" } ], "semanticType": 0, "service": "OS14948762876.action", "sessionIsEnd": false, "shouldEndSession": false, "sid": "atn0bd03c82@dx00011c038d2ea19000", "state": null, "test": "true", "text": "握个手", "uuid": "atn0bd03c82@dx00011c038d2ea19000", "vendor": "OS14948762876", "version": "7.0", "voice_answer": [ { "content": "好让我们握个手吧", "type": "TTS" } ] } ~~~ ## 3. 定义机器人交互技能 如需要实现机器人动作指令语音、设备人设和知识问答等业务,需要申请AIUI平台账号和应用配置自定义技能、官方技能、设备人设和文档问答。 可参考多模态套件平台功能使用手册([https://aiui-doc.xf-yun.com/project-2/doc-397/](https://aiui-doc.xf-yun.com/project-2/doc-397/))中多模态交互自定义实现机器人动作指令语音、设备人设和知识问答等业务,需要申请AIUI平台账号和应用配置自定义技能、官方技能、设备人设和文档问答。
admin
2025年9月29日 19:44
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码