机器人超脑平台
平台简介
成为超脑平台用户
讯飞超脑板
产品规格
开发指南
标准协议
使用手册
环境准备
数据采集
应用算法
应用实例
镜像导出
镜像烧录
错误码
算法配置表
机器人多模态交互开发套件
多模态交互套件产品白皮书
多模态交互套件快速体验
多模态套件平台功能使用手册
多模态交互套件开发手册
常见问题与解答
智能语音背包
智能语音背包产品白皮书
智能语音背包产品规格书
智能语音背包产品快速体验
智能语音背包产品开发手册
联系方式
服务条款
超脑平台服务协议
超脑平台隐私政策
本文档使用 MrDoc 发布
-
+
首页
应用算法
## 3.1 手势识别 目前一共支持以下手势:拇指向上,拇指向下,手势V,手势6,手势8,停止手势,食指左右摆动,手掌左右摆动,顺时针旋转食指,逆时针旋转食指,向左挥手,向右挥手. 前置条件:启动usb摄像头 (ros2 run usb_camera usb_camera_node) 启动方式:ros2 launch aikit_cv cv.launch.py 查看话题名称:ros2 topic list  可以通过ros2 topic echo /r_cv/result来查看手势识别结果,也可自行订阅该节点查看 查看该topic的消息类型:ros2 topic info /r_cv/result 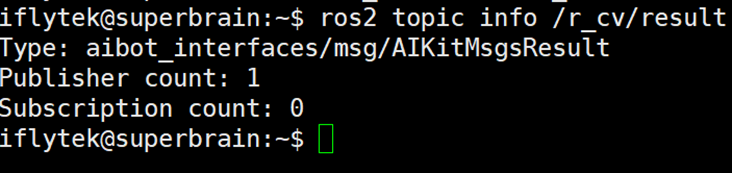 查看该消息格式: ros2 interface show aibot_interfaces/msg/AIKitMsgsResult  ## 3.2 智能语音 支持多种音频采集方式,需要搭配不同的配件使用,常见的有: 1.讯飞USB声卡(线性四麦环形六麦 链接:);(需要使用超脑板降噪唤醒算法 2.讯飞R818降噪板(线性四麦,环形六麦 链接);(降噪唤醒运行在R818板子上,超脑板只提供语音交互) R818降噪板启动方式:ros2 launch aibot_r818 r818.launch.py 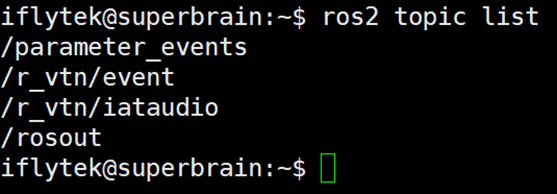 /r_vtn/event 为唤醒、免唤醒事件; /r_vtn/iataudio为降噪后音频. 没有原始音频,若想查看原始音频,请参考R818降噪板相关文档. 3.开发者自购的其他麦克风产品(超脑板只提供语音交互能力) 1.语音降噪唤醒、免唤醒控制、声源定位. (使用讯飞USB声卡) 小车默认搭载的是环形六麦阵列麦克风和环形六麦算法. 免唤醒词(前后左右等控制目前没有) 前置条件:启动录音 录音使用portaudio库录音 首先使用lsusb 查看录音设备名: 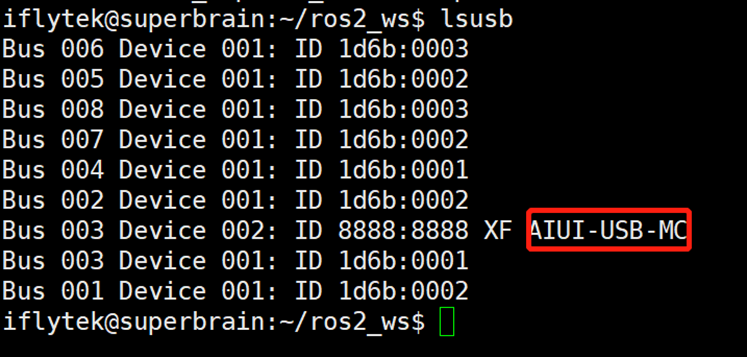 在audio_capture.launch.py文件中修改mic_name值: 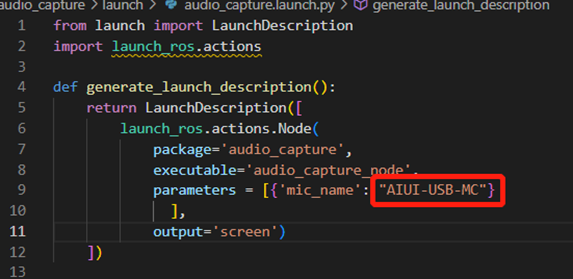 启动录音命令:ros2 launch audio_capture audio_capture.launch.py 启动唤醒命令: ros2 launch aibot_vtn vtn.launch.py 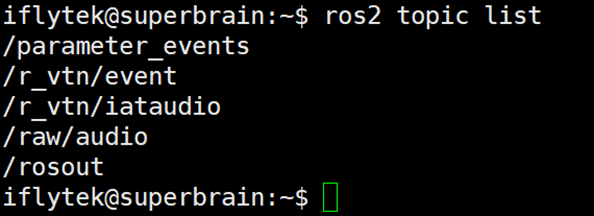 /raw/audio为原始音频; /r_vtn/event 为唤醒、免唤醒事件; /r_vtn/iataudio为降噪后音频.  唤醒事件结果如上,angle 为声源角度. 2 语音交互 1. 若使用aiui语音交互,需要在官网上创建应用并配置所需的技能. 详见链接: 2. 接口说明详见aikit文档. 3. 启动命令 ros2 launch aikit_aiui aiui.launch.py 4. 语音交互的结果通过topic: /r_aiui/result下发 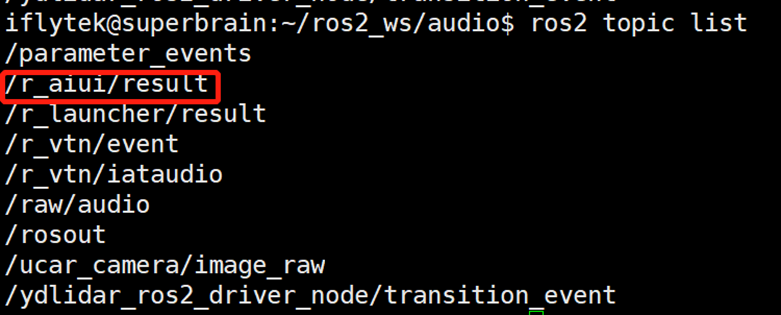 下发结果有识别、语义以及语义合成音频,也可以主动调用websocket接口合成语义结果。 代码示例在aibot_user_client功能包 AIKitAiui.cpp源文件里 ## 3.3 IOT平台 1.平台提供了设备管理、数据管理、应用开发、服务支持等功能,支持多种设备、协议、接口、数据格式等,可以灵活地扩展和定制。同时,该平台还提供了丰富的开发工具、API、SDK 等,支持应用程序的开发、测试、部署和运行,以及应用程序与设备、数据之间的交互和集成 2. 接口文档详见aikit文档 3. 启动命令 ros2 launch aikit_iot iot.launch.py 4.通过topic /r_iot/result 和/r_iot/write来和iot进行通信, 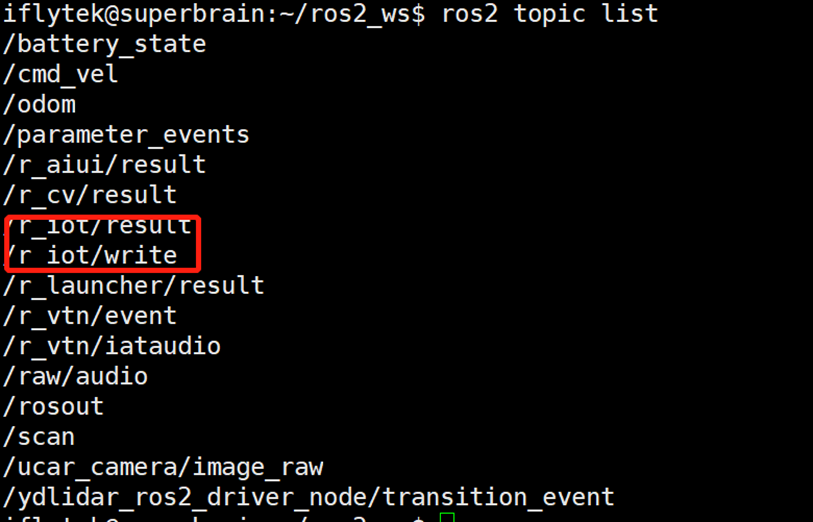 代码示例在aibot_user_client功能包RobotIot.cpp源文件里. ## 3.4 XRTC平台 平台提供了一种实时音视频通信服务,依托先进的弱网对抗、编解码及音视频处理技术,提供高品质、低延时、高清流畅、简单易用、安全稳定的实时音视频通信服务。该平台适用于在线教育、视频监控、视频会议、远程医疗、远程庭审等场景,帮助用户实现高效便捷的实时音视频通信。链接: 2. 接口文档详见aikit文档 3. 启动命令 ros2 launch aikit_xrtc xrtc.launch.py 4.通过service /r_xrtc/room 进行推流. 详见aikit文档说明 代码示例在aibot_user_client功能包RobotXrtc.cpp源文件里 ## 3.5 启动说明 为了统一管理,创建了一个launcher功能包.通过launcher/config/AIBot.json 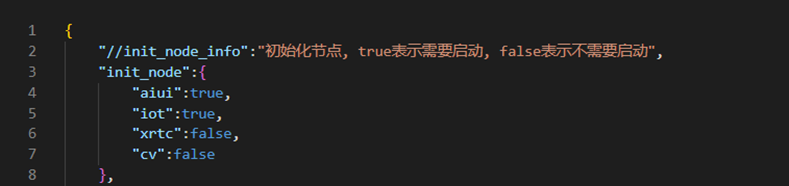 根据需求需要启动哪些功能. 初始化流程:通过service /r_launcher/init 将参数发送到launcher节点. 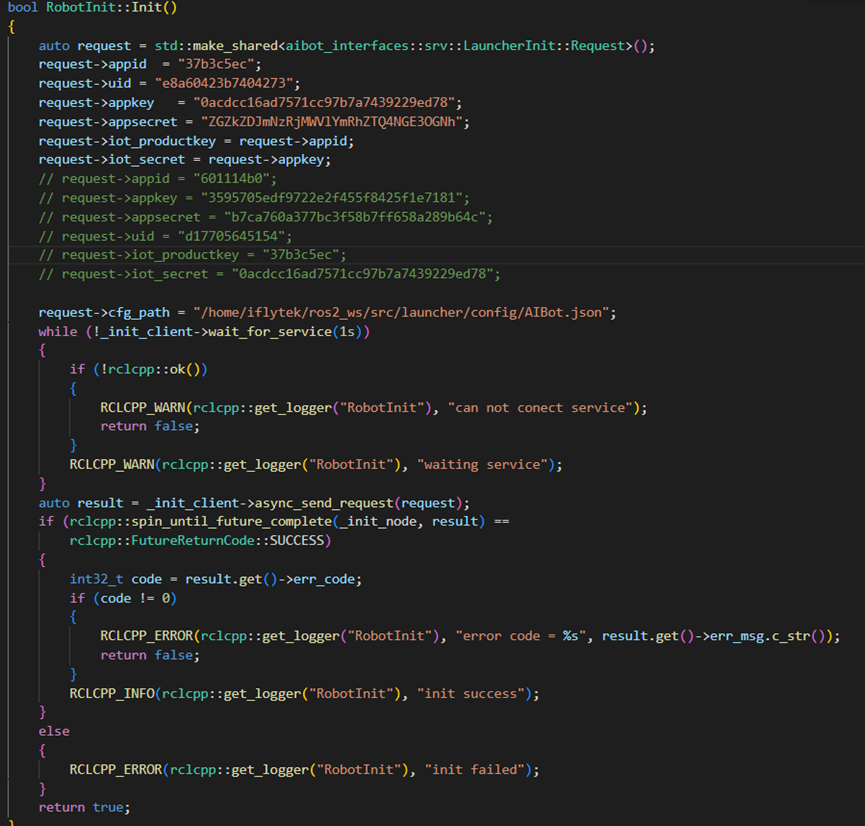 (代码示例在aibot_user_client功能包RobotInit.cpp源文件里.) uid是设备唯一ID; appid/appkey/appsecret是创建应用时生成的重要参数. launcher节点收到参数之后,会将参数分别转发到已启动的功能节点上 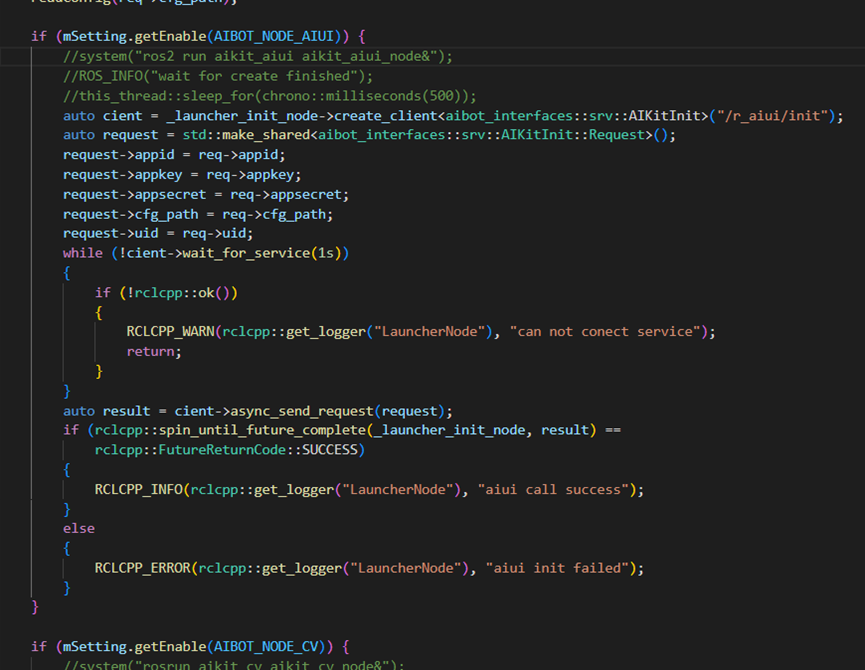 代码在launcher/src/ LauncherNode.cpp文件里. 启动命令 ros2 launch launcher launcher.launch.py 启动客户端:ros2 launch aibot_user_client user_client.py(这个是客户需要完善的,这个节点只是实现了基础通信,客户自己的业务需求需要自己添加)
admin
2023年6月28日 17:16
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码