机器人超脑平台
平台简介
成为超脑平台用户
讯飞超脑板
产品规格
开发指南
标准协议
使用手册
环境准备
数据采集
应用算法
应用实例
镜像导出
镜像烧录
错误码
算法配置表
机器人多模态交互开发套件
多模态交互套件产品白皮书
多模态交互套件快速体验
多模态套件平台功能使用手册
多模态交互套件开发手册
常见问题与解答
智能语音背包
智能语音背包产品白皮书
智能语音背包产品规格书
智能语音背包产品快速体验
智能语音背包产品开发手册
联系方式
服务条款
超脑平台服务协议
超脑平台隐私政策
本文档使用 MrDoc 发布
-
+
首页
数据采集
# 2. 数据采集 ## 2.1 USB摄像头采集 ### 2.1.1 功能介绍 机器人产品一般会搭载摄像头来获取图像信息,主要用来: 1.监控功能; 2.进行人脸检测、人脸识别,手势识别等图像算法; 3.周边环境感知; ### 2.1.2 使用说明 参数介绍 ssh登录开发板; 进入目录~/ros2_ws/src/usb_camera/usb_camera, 打开usb_camera.py文件 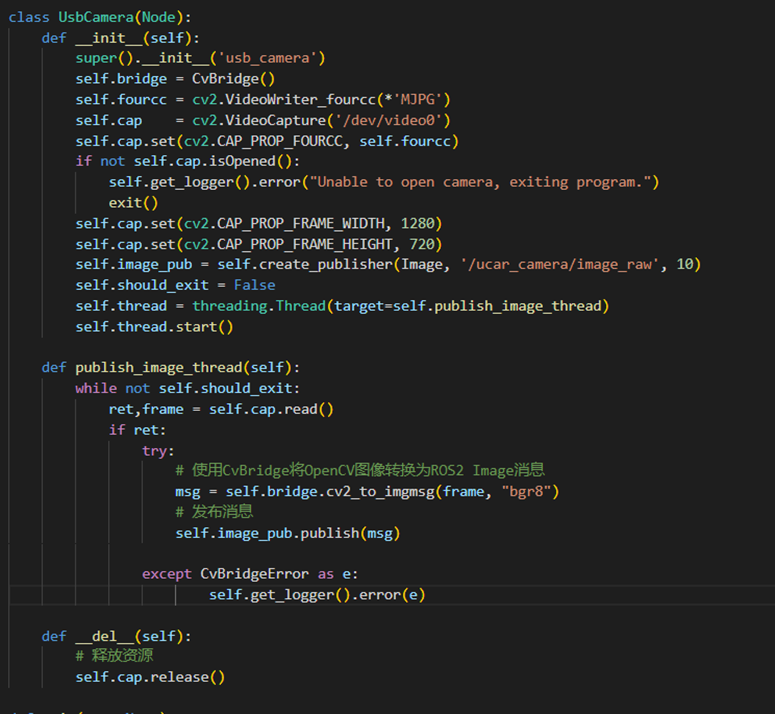 其中/dev/video0是摄像头设备名称,摄像头支持的编码格式、图像宽高、帧率等参数. 可以通过v4l2工具查看:v4l2-ctl --device=/dev/video0 --list-formats-ext 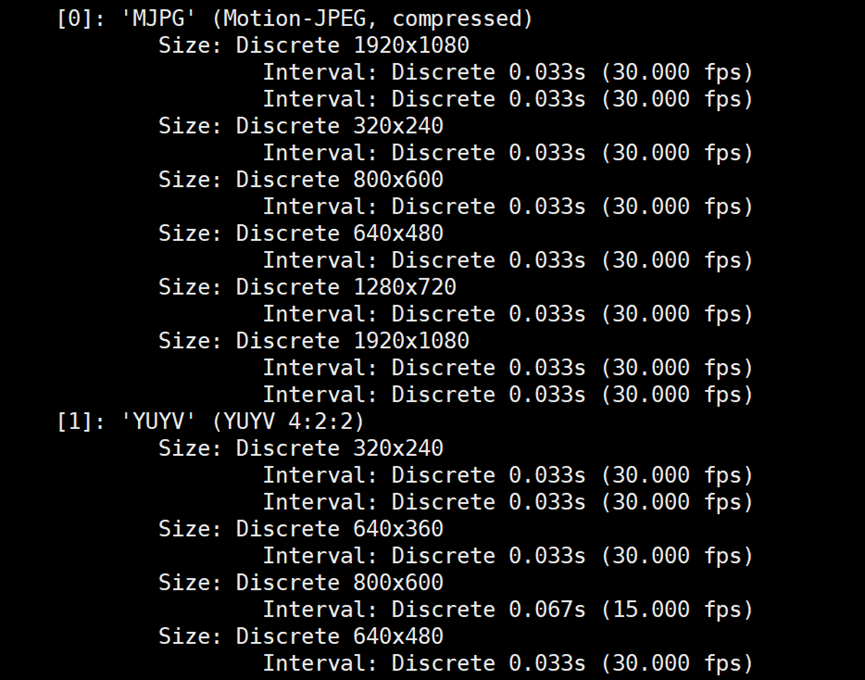 摄像头插拔时,设备名称可能发生改变,可以通过udev规则来映射别名. 1.先通过lsusb命令查看usb摄像头VID(Vendor ID)和PID(Product ID) 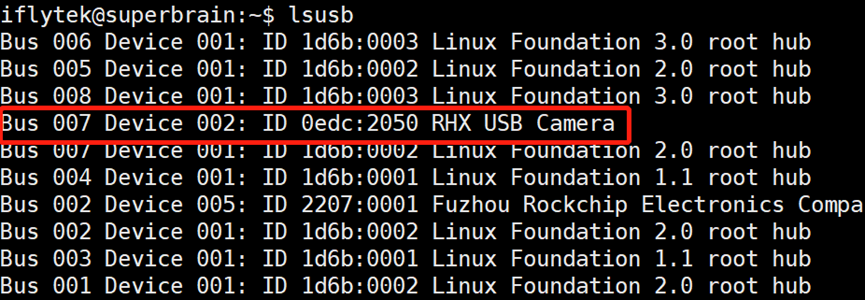 Vendor ID为0edc, Product ID为2050. 需要注意的是插入一个usb摄像头有可能会对应两个设备节点,例如/dev/video0 和/dev/video1. /dev/video0是用于视频采集的设备节点,可以通过该节点读取摄像头采集到的视频数据; /dev/video1是用于控制摄像头参数的设备节点,可以通过该节点设置摄像头的亮度、对比度、曝光等参数。 通过 ATTR{index}属性来选择要映射的设备节点 命令查看 index 值:udevadm info --attribute-walk --name=/dev/video0 | grep ATTR{index} 2.创建一个usb_camera. rules文件,将 KERNEL=="video*", ATTRS{idVendor}=="0edc", ATTRS{idProduct}=="2050",ATTR{index}=="0", MODE:="0777", SYMLINK+="usb_camera" 添加到usb_camera.rules文件中,然后将该文件存储到/etc/udev/rules.d/目录下 执行以下命令或重启设备 1.sudo service udev reload 2. sudo service udev restart 启动方式 启动:ros2 run usb_camera usb_camera_node 查询话题名称: ros2 topic list 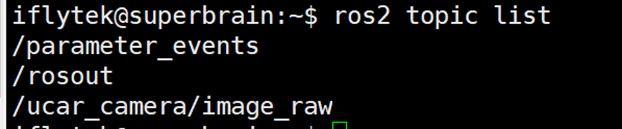 可以通过rviz2 订阅该topic查看图像数据.: 在 rvid2界面上首先点击 add 按钮,然后点击by topic选择发布的图像,选择 /ucar_camera/image_raw,然后点击image: (两张截图) ## 2.2 雷达数据采集 启动: ros2 launch ydlidar_ros2_driver ydlidar_launch.py  查看话题名称:ros2 topic list  可以通过rviz2 订阅该topic查看数据.: 在 rviz2界面上首先点击 add 按钮,然后点击by topic选择发布的图像,选择 /scan ## 2.3 imu 和odom数据采集 启动: ros2 launch turn_on_wheeltec_robot base_serial.launch.py 查看话题名称:ros2 topic list 
admin
2023年6月21日 14:15
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码