机器人超脑平台
平台简介
成为超脑平台用户
讯飞超脑板
产品规格
开发指南
标准协议
使用手册
环境准备
数据采集
应用算法
应用实例
镜像导出
镜像烧录
错误码
算法配置表
机器人多模态交互开发套件
多模态交互套件产品白皮书
多模态交互套件快速体验
多模态套件平台功能使用手册
多模态交互套件开发手册
常见问题与解答
智能语音背包
智能语音背包产品白皮书
智能语音背包产品规格书
智能语音背包产品快速体验
智能语音背包产品开发手册
联系方式
服务条款
超脑平台服务协议
超脑平台隐私政策
本文档使用 MrDoc 发布
-
+
首页
环境准备
## 1.1 网络配置 体验和开发过程种需要使用scp/ssh 等命令通过IP地址访问,因此需要配置无线网络,配置请参考如下 ### 1.1.1 HDMI 通过HDMI链接显示屏,对于使用Ubuntu版本系统的用户,可点击桌面右上角Wi-Fi图标,选择对应热点并输入密码以完成网络配置。 ### 1.1.2 Hostport 对于没有显示屏的情况,超脑板提供了热点模式,可通过命令行完成无线网络配置,步骤如下: 使用PC链接超脑板热点,名称:`Hostpot`,密码:`12345678` 打开终端输入` ssh iflytek@10.42.0.1 ` 密码:`iflytek` 进入超脑后,使用`sudo nmcli device wifi list`命令列出扫描到的热点。 在找到扫描完成后,使用 ` sudo nmcli device wifi connect WIFI_NAME password PASSWORD`命令连接热点,返回如下信息,说明网络连接成功 Device 'wlan0' successfully activated with '60145449-1953-4a32-8ba4-f9a6102e1b32'. 在超脑端输入`ifconfig`命令,查看ip 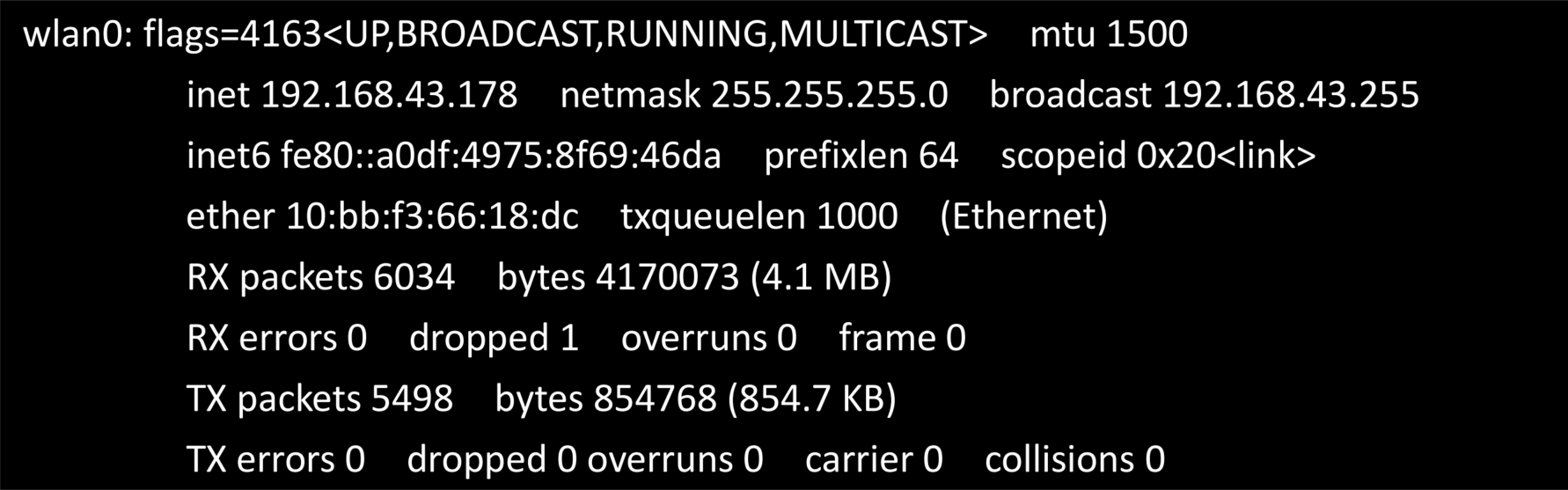 可以看到超脑端目前 IP 地址是`192.168.43.178`, `ssh iflytek@超脑端 IP 地址` ,因此输入`ssh iflytek@192.168.43.178`,第一次 ssh 登陆会有提示,输入`yes`即可。 ## 1.2 ROS 安装 (默认的超脑板已经安装了 ROS2 环境) ### 1.2.1 ROS1 安装 1) 添加ROS软件源 通过ssh或HDMI连接超脑板,终端输入 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' 2) 添加密钥 将以下命令复制到终端执行 sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 成功后会显示如下: 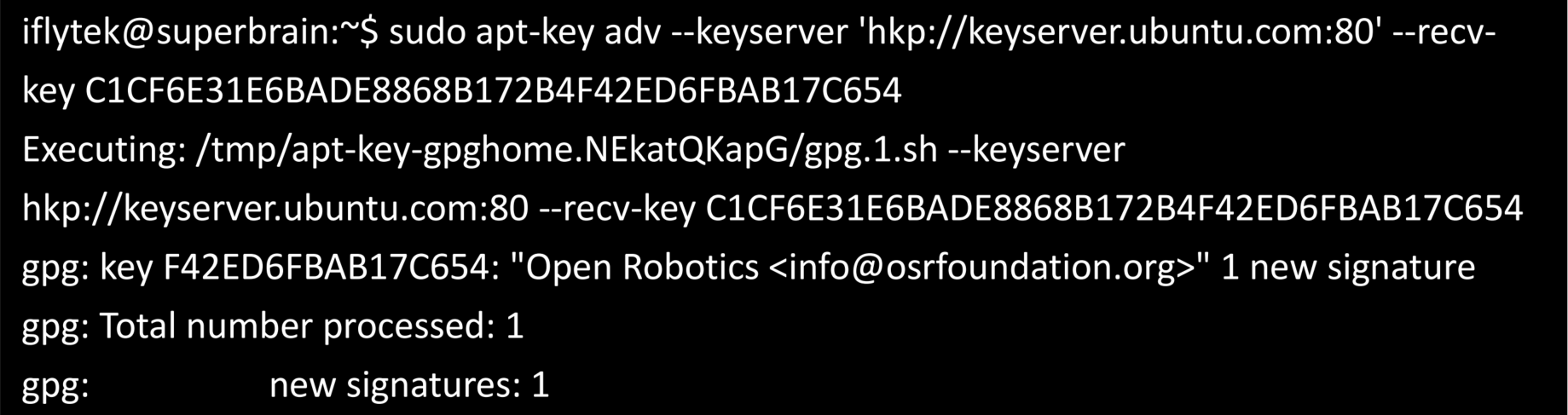 3) 更新软件源 将以下命令复制到终端执行(若wifi更新慢或者失败的话,切换至手机热点,再执行下面的命令,可能会出现部分ubuntu自带的源出错,可以忽略) sudo apt update 4) 安装 因ubuntu版本的不同其安装指令也有可能不同,ubuntu20.04 执行下面的命令来安装: sudo apt install ros-noetic-desktop-full 5) 设置环境变量 输入下面的这行命令,设置ROS环境 echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc 6) 安装rosinstall sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool ### 1.2.2 ROS2 安装 1) 添加秘钥 sudo apt install curl gnupg2 -y curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add – 2) 设置软件源 sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list' 3) 更新软件源 将以下命令复制到终端执行(若wifi更新慢或者失败的话,切换至手机热点,再执行下面的命令,可能会出现部分ubuntu自带的源出错,可以忽略) sudo apt update 4) 安装 sudo apt install ros-foxy-desktop 5) 安装自动补全工具 输入以下指令进行安装,其中-y表示当执行该命令后,出现需要选择确认或取消的时候(即选择y/n的时候),自动选择y sudo apt install python3-argcomplete –y 6) 设置环境变量 在使用之前还要对环境变量进行配置,在终端输入如下指令: echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc source .bashrc 7) DOMAIN_ID设置 若需要多机链接则需要设置同一DOMAIN_ID,这里我们设置ID为33。 echo "export ROS_DOMAIN_ID=33" >> ~/.bashrc ### 1.2.3 ROS1与ROS2 共存 连接超脑板,终端输入 `vi ~/.bashrc` 转到末尾,按a键,并且将 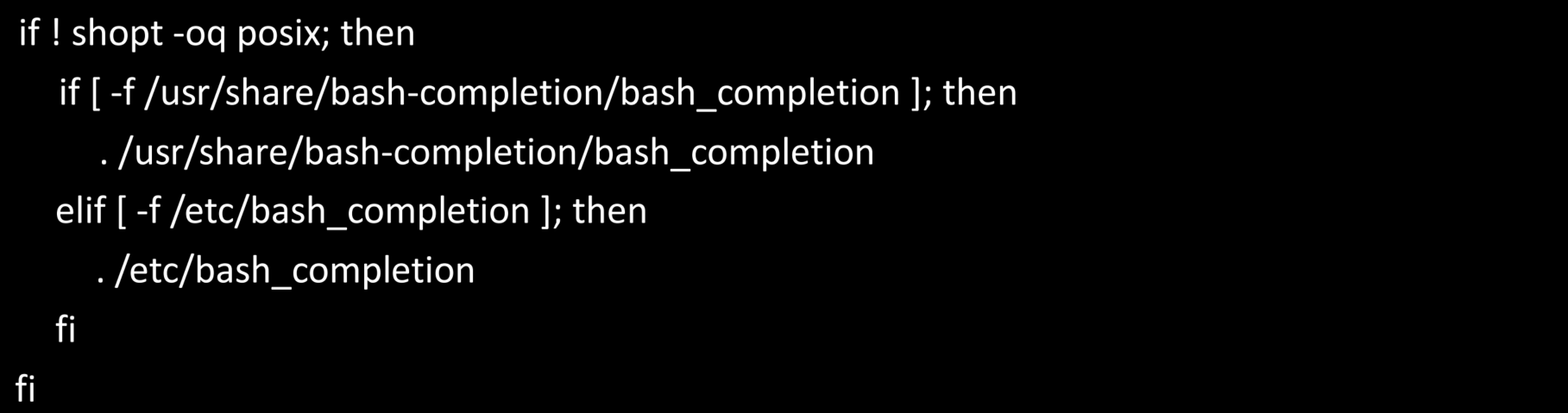 之后的内容删去,替换为 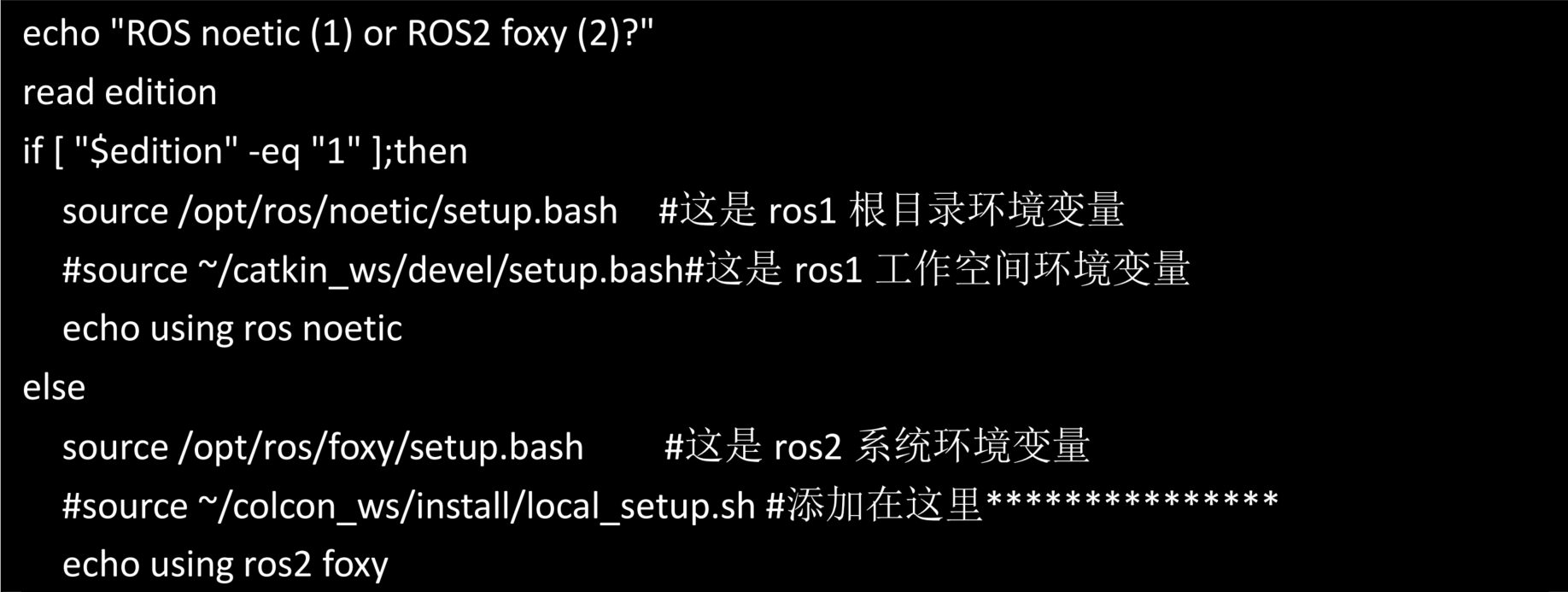 完成后按Esc键,输入:wq即可。 ### 1.2.4 运行测试 1) ROS1 启动三个终端,均ssh登陆至讯飞超脑板,选择noetic版本 第一个终端运行 roscore 第二个终端运行 rostopic pub /data std_msgs/Int16 "data: 0" 第三个终端运行 rostopic echo /data 会出现  2) ROS2 启动两个终端,均ssh登陆至讯飞超脑板,选择foxy版本 第一个终端运行 ros2 run demo_nodes_cpp talker 第二个终端运行 ros2 run demo_nodes_cpp listener 运行结果 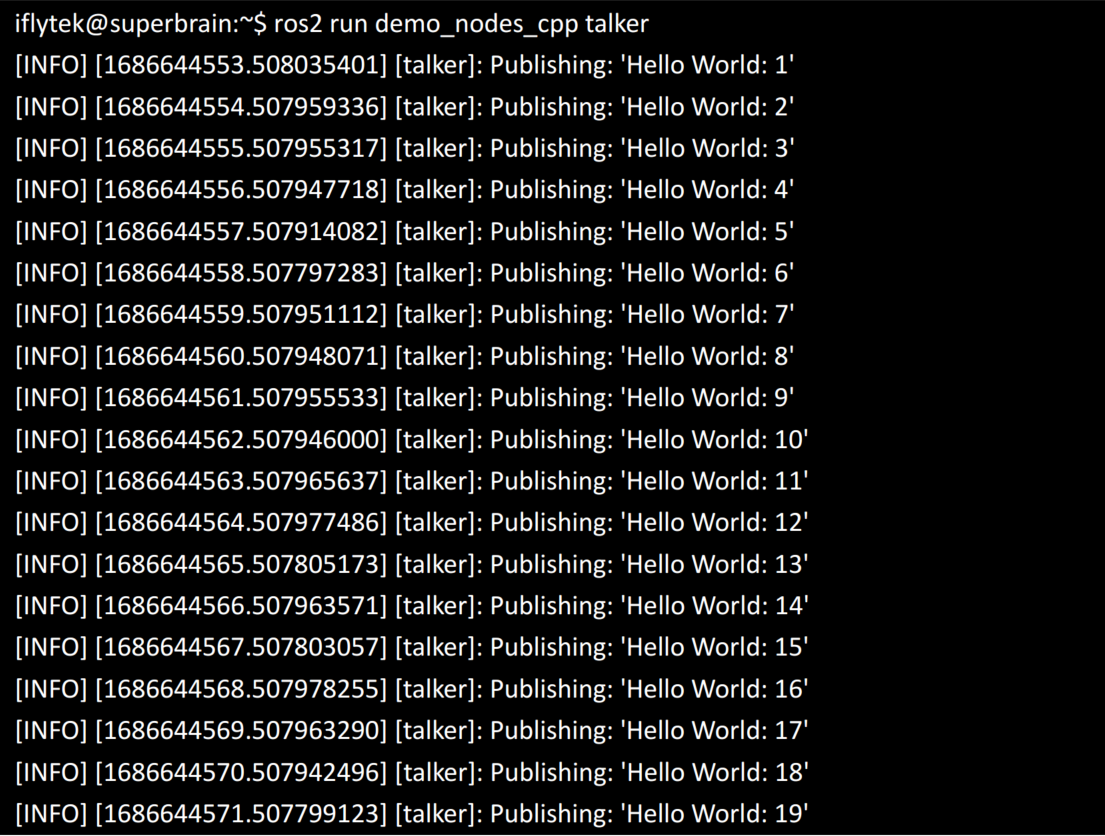 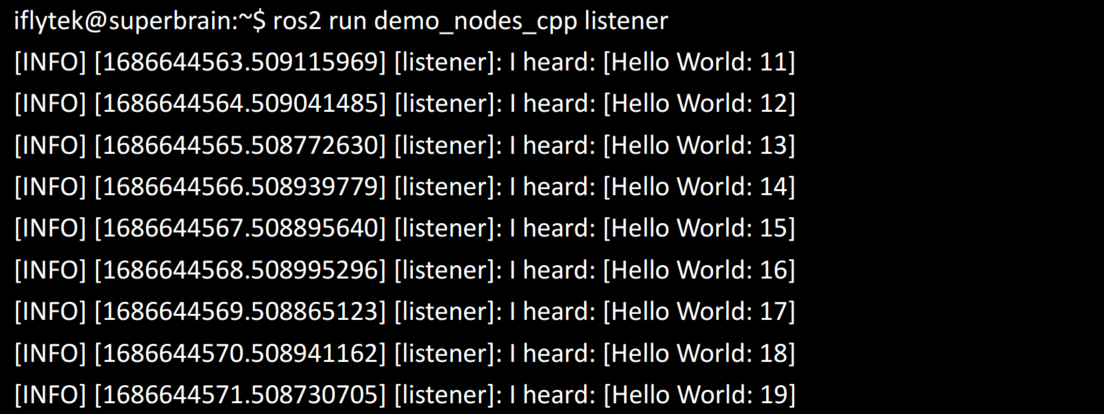
admin
2023年6月21日 14:24
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码